"Calibration" メニュー
|
注記 |
|---|
|
Calibration メニューは、動作ポイント軸が選択されている場合にのみ表示されます。軸を選択するには In/Outputs → Set Operating Point Axes コマンドを使用します(Set Operating Point Axesを参照)。 |
Calibration メニューには以下のエントリが含まれます。
- Operating Points
- Driving Cycles
- Calibration Maps
- Map Bounds over OP
- Map Viewer & Converter
- Result Maps
- Result Value Table
- Prognosis
Operating Points
"Operating Points Manager" ウィンドウを開きます。
Driving Cycles
"Driving Cycle Manager" ウィンドウを開きます。
走行サイクルは各国または所定の組織により作成され、車両のパフォーマンス(燃費や排出物など)を評価するために用いられます。この走行サイクルは、車両シミュレーションにも利用することができます。具体的には、駆動系シミュレーションや、内燃エンジンの性能予測、トランスミッション、電気駆動系、バッテリ、燃料電池系、その他コンポーネントへの応用が可能です。
Calibration Maps
Calibration Maps サブメニューには以下のエントリが含まれます。
-
<n: input>
"<input> Calibration Map" ウィンドウが開き、選択された入力について、最適化時に複数の動作ポイントにおいて得られた適合マップが表示されます。
-
Open all Maps
"<input> Calibration Map" ウィンドウが開き、最適化で得られたすべての適合マップが表示されます。
-
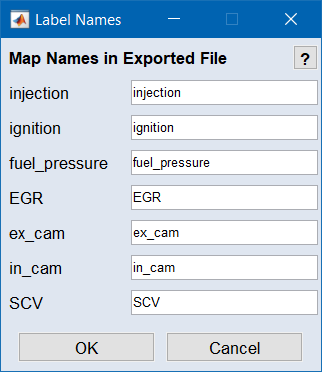
すべての入力の適合マップをファイル(DCM、CDFX、CSV)に保存します。保存する前に、変数ラベルの名前を入力するためのウィンドウが開きます。
-
Import
適合マップをファイル(DCM、CDFX、CSV、Excelファイル、またはASCMOプロジェクトファイル)からプロジェクトにロードします。ロードする前に、ファイル内の変数ラベルをプロジェクトの入力に割り当てるためのウィンドウが開きます。
-
サブメニューアイテム(<n: input> または Use All Maps)で選択した適合マップが入力として使用されます。この入力はISPビューにおいて赤色フォントで強調表示されます。
-
すべてのワーキングマップをアクティブにします。
-
Use Reference Page
すべてのリファレンスマップをアクティブにします。
-
すべてのワーキングマップをリファレンスマップとして設定します。
-
Reset Maps from Reference Page
すべてのワーキングマップを、前回リファレンスマップとして設定した時のマップに戻します。
メインウィンドウのツールバー、または Calibration → Calibration Maps → Use Working Page/Use Reference Page での選択に応じて、ワーキングマップまたはリファレンスマップが表示されます。現在のワーキングマップをリファレンスマップとして確定するには File → Set Reference Page、編集したワーキングマップをリファレンスマップの内容に戻すには、File → Reset from Reference Page を使用します。
|
注記 |
|---|
|
適合マップをリファレンスマップとして確定すると、そのマップは編集できなくなります。 |
応用例:最適化によって得られた適合マップをリファレンスマップとして設定し、その後、条件を変えてさらに最適化を行い、2つの結果を比較する
|
注記 |
|---|
|
これは、予測の結果についても同様です。 |
Map Bounds over OP
測定データの範囲に上下限値を割り当てることができます。これらの上下限値の基点は現在定義されている動作ポイントのグリッドにより決まります。
上下限値は、最適化や以降のマップの表示(Calibration > Calibration Maps)に使用されます。
-
<n: input>
各入力の測定データおよびそれらのデータについて現在設定されている上下限値のプロットを開きます(参照:"<input> - Map Bounds" ウィンドウ)。
-
Open all Bounds
すべての入力の測定データについて、測定データの最大値と最小値を上下限値とします(参照:"<input> - Map Bounds" ウィンドウ)。
-
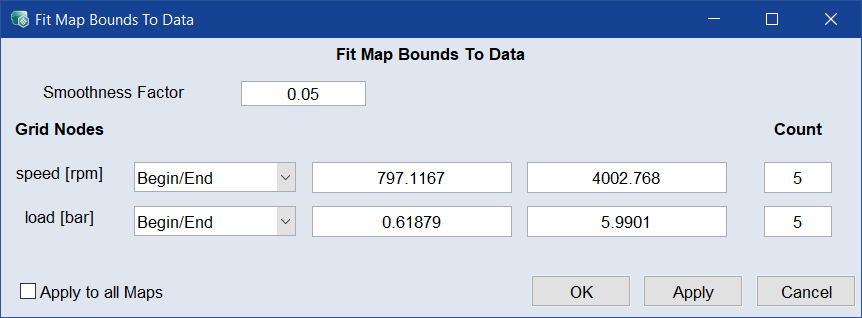
Fit Bounds to Data
 "Fit Map Bounds To Data" ウィンドウを開き、現在のマップの上下限値を測定データに合わせます。
"Fit Map Bounds To Data" ウィンドウを開き、現在のマップの上下限値を測定データに合わせます。 -
Fit Bounds to Min/Max
すべての入力の測定データについて、測定データの最大値と最小値を上下限値とします。
-
Export All Bounds
すべての上下限値をファイル(*.dcm、*.cdfx、*.csv)ファイルにエクスポートします。
-
Import All Bounds
エクスポートファイル(*.dcm、*.cdfx、*.csv、*.xls、*.ascmo)からすべての上下限値をインポートします。
Map Viewer & Converter
![]() "Map Viewer & Converter" ウィンドウが開いてマップがプロット表示され、エクスポートも行えます。選択した入力と出力を軸として、Result Value Table のデータが表示されます。
"Map Viewer & Converter" ウィンドウが開いてマップがプロット表示され、エクスポートも行えます。選択した入力と出力を軸として、Result Value Table のデータが表示されます。
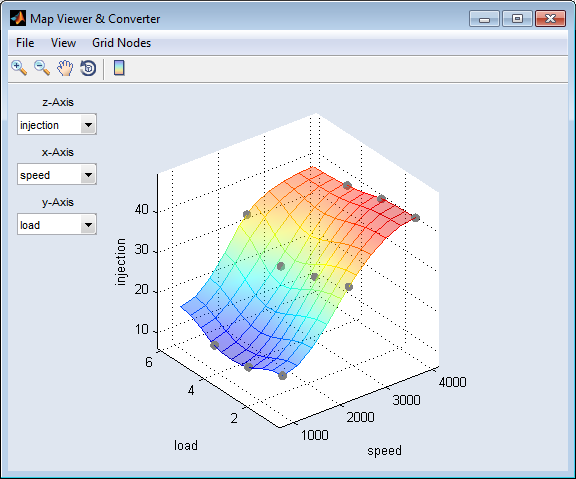
- File → Export...
適合マップを DCM ファイルまたは CSV ファイル(<project name>_CM_<input>.*)に保存します。保存する前にラベルを入力することができます。 - File → Close
"Map Viewer & Converter" ウィンドウを閉じます。 - View → Save as Bitmap...
プロットをグラフィックフォーマットで保存します。 - View → Copy to Clipboard
プロットのビットイメージをクリップボードにコピーします。 - View → Visible Z-Range
プロットのZ軸の範囲を調整します。 - View → Show Toolbar
ツールバーの表示/非表示を切り替えます。 - View → Prepare Print
"Prepare Print Options" ウィンドウを開いて、プロット領域の外観を設定します。この設定は散布図ウィンドウを閉じるとリセットされます。 - View → Contour Mode
3Dプロットにおいて等高線の表示/非表示を切り替えます。 - Grid Nodes → Load Grid
ファイル(*.dcm、*.csv、*.xls)からグリッドをインポートします。 - Grid Nodes → Define Grid Nodes
新しいグリッドについて、値とグリッドノードの数を指定します。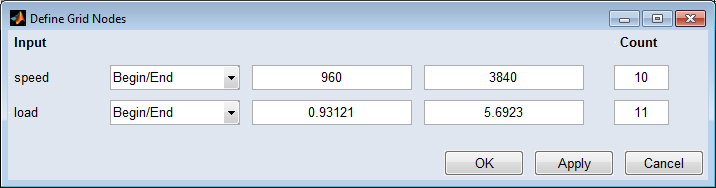
- Grid Nodes → Set to Operating Points
最適化が実行された動作ポイントのグリッドを基点として、適合を行えるようにします。 - Grid Nodes → Table
プロットウィンドウに表示されている結果マップをテーブル表示します。テーブルの値は File → Save Table... で保存できます。 - Grid Nodes → Smoothing
プロットウィンドウにスライダエディタを表示します。それを使用してマップを平滑化することができます。"Edit Grid" モードのマップではこの機能は使用できません。
ウィンドウのツールバーには以下のエレメントが含まれます。

|
Zoom In | プロットをクリックすると表示が拡大されます。 |

|
Zoom Out | プロットをクリックすると表示が縮小されます。 |

|
Pan | プロットをウィンドウ内で移動させることができます。 |

|
Rotate 3D | プロットを3次元空間の全方向に回転させることができます。 |

|
Insert Colorbar | 相関のスケールを表すカラーバーを表示します。 |
Result Maps
Result Maps サブメニューには以下のエントリが含まれます。
-
<n>: <output>
選択した出力について "<output> Result Map" ウィンドウを開き、最適化の結果を3Dプロットとして表示します。
-
Open All Maps
すべての出力の結果マップを、それぞれ個別のウィンドウに表示します。
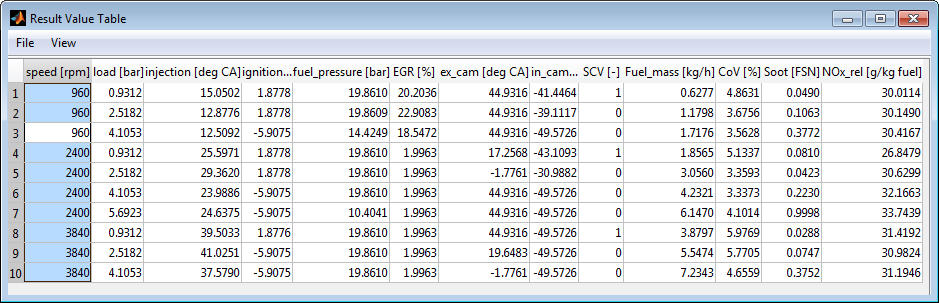
Result Value Table
![]() "Result Value Table" ウィンドウ が開き、最適化が実行されたすべての動作ポイントにおける入力/出力の最適化結果が含まれるテーブルが表示されます。
"Result Value Table" ウィンドウ が開き、最適化が実行されたすべての動作ポイントにおける入力/出力の最適化結果が含まれるテーブルが表示されます。
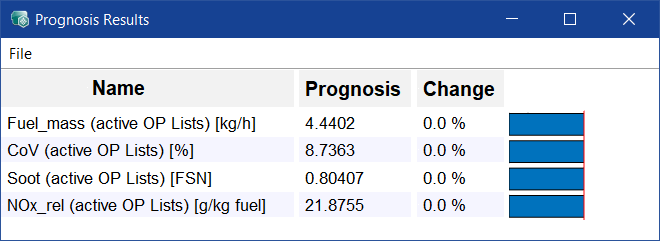
Prognosis
最適化から得られた結果により、燃料消費量や排出量などについての予測を表示することができます
-
"Calculation Rules for Prognosis" ウィンドウを開きます。モデル出力の値を既知のパラメータや所定の走行サイクルに合わせて調整するには、ここで変換と重み付けを行います。
-
"Prognosis OP-Weights" ウィンドウを開きます。
所定の動作ポイントに留まる時間を反映した重みを付けて、走行サイクルをマッピングできます。動作ポイントの重みは、軌跡を計測することによって求めることもできます。それには、各測定値がそれぞれ1つの動作ポイントに割り当てられて合計され、各動作ポイントの重み付けが行われます。
-
"Prognosis Results" ウィンドウが開き、各出力の予測パラメータ(Prognosis → Calculation Rules)やマップを変更したことによる効果が表示されます。