Modeling the Function
In the tutorial you will build the following function of the physical engine torque model.
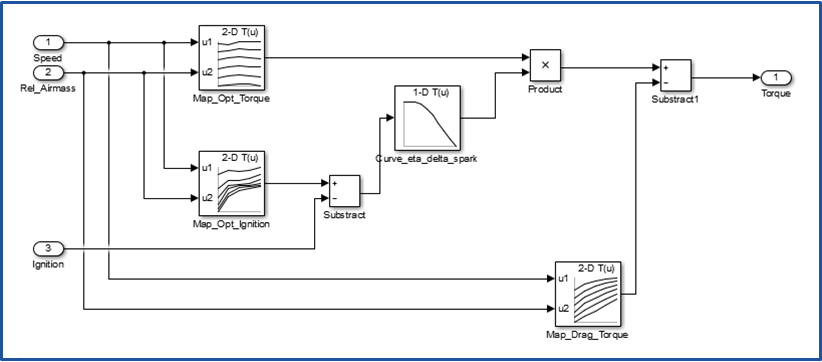
Fig. 8: Structure of the function to be modeled
|
Note |
|---|
|
Functions are always set up from left to right. |
The model function shown in Structure of the function to be modeled contains the following inputs:
- 1 - Speed
- 2 - Rel_Airmass
- 3 - Ignition
In addition to the inputs, you have imported the measured model output Torque_Meas in Step 1: Data Import. These values will be used as reference for the optimization, for minimizing the deviation between the measured values and the function prediction TorquePredict.
For this tutorial, you will perform the following tasks:
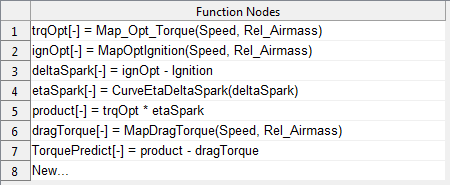
After adding the node TorquePredict, the creation of the function to be optimized as a representation of the physical torque model is finished. The Function Nodes table should look like this:
|
Note |
|---|
|
If you activate the Edit Mode option in the main working window (Step 5: Build Up the Function), you can change the elements of the function directly in the Function Nodes table. The names of data, parameters and nodes are marked with %.
|

In the next step (see Step 3: Parameters), you have the possibility to check and edit the created parameters, if appropriate.