外生入力を伴う非線形自己回帰(NARX)
データ駆動型モデリングアルゴリズム(ASCMO-DYNAMICのASCモデリングの部分など)による動的影響は、高次モデル構造を使用することにより考慮できます。離散時間の場合は、図67に示すように、過去の入力値と出力値のフィードバックによりシステム入力空間が所定の計画対象期間まで拡大されます。文献ではこれを、「外生入力を伴う非線形自己回帰」(NARX:Nonlinear autoregression with exogenous inputs)と呼んでいます。以降の説明ではフィードバック値を「フィーチャー」(features)と呼びます。
このアプローチにより、動的同定問題は以下の式のような準定常的関係に変換されます。
y(k)=f(x_1 (k),x_1 (k-1),…,x_2 (k),x_2 (k-1),…,y(k-1) ,…)
式中のkは離散時間ステップを示します。
連続的に測定されるシステム入力とシステム出力のデータセットに基づいて、ASC モデリングアルゴリズム、あるいは他のすべてのデータ駆動型回帰を、関数関係f( ) のモデリングに適用できます。
1段先行予測と多段先行予測の違い
モデルトレーニング実施後のモデル予測のシナリオは、以下の2 通りに分かれます(図67を参照してください)。
-
1段先行予測(One-step ahead prediction)
1段先行予測の場合は、過去のシステム出力はセンサなどから実測により得られる既知の値です。モデルが予測しなければならないのはすぐ次の時間ステップだけです。
-
多段先行予測(Multi-step ahead prediction)
過去のシステム出力値の代わりにモデルの予測が使用されます。これはオフラインシミュレーションに相当する標準的な使用事例であり、ユーザーは所定のさまざまな入力に対するモデルの応答を要求します。
多段先行予測によって得られるモデルは、予測誤差の累積により、1段先行予測によるモデルよりも品質が低くなるのが一般的です。
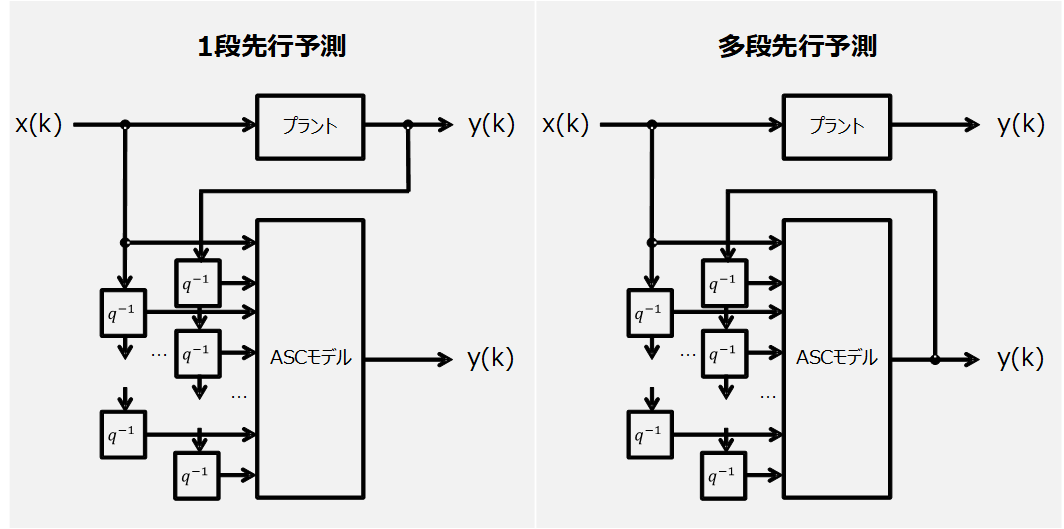
図67: 外生入力を伴う非線形自己回帰(NARX)のモデル構造 - 1 段先行予測(左)と多段先行予測(右)
1段先行予測/多段先行予測 も参照してください。