最適化用パラメータの定義
最適化を開始する際には、先にすべての変数についてパラメータの許容変動範囲を定義しておく必要があります。
|
注記 |
|---|
|
Calibration メニューは、データのインポート時に動作ポイント用の軸が選択されていた場合にのみ表示されます(入力と出力の割り当てを参照してください)。インポート後に軸を選択するには、メニューで In/Outputs > Set Operating Point Axes を選択します。 |
パラメータの変動範囲を制限する
-
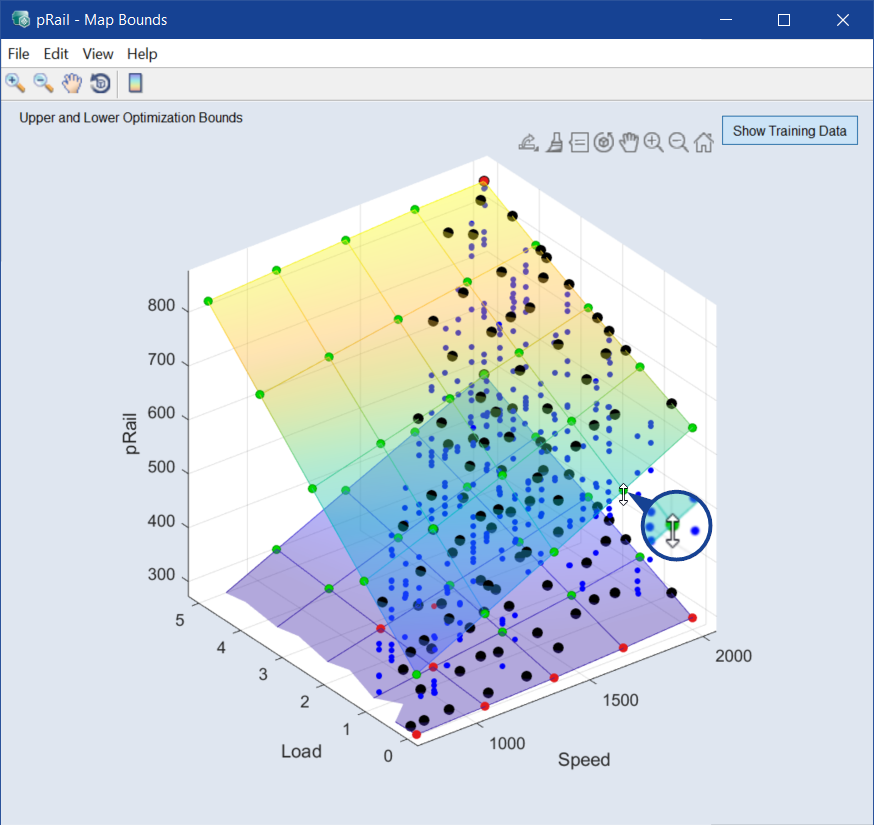
Calibration > Map Bounds over OP > Fit Bounds to Data を選択します。
すべての <input> - Map Bounds ウィンドウが開きます。さらに Fit Map Bounds to Data ウィンドウが開きます。後者のウィンドウでは、Apply to all Maps がオンになっています。
-
Fit Map Bounds to Data ウィンドウで、必要に応じて以下の操作を行います。
- マップ境界の平滑度係数を入力します。
- Grid Nodes 領域でグリッドを調整します。
-
OK または Apply をクリックして続行します。
すべての入力の有効範囲が実測値の範囲に調整されます。これにより各パラメータは、すべての動作ポイントにおいて実測範囲内の値にしか調整できなくなります。
-
この境界値を手動で変更するには、緑色の動作ポイントの1つをクリックします。
-
マウスカーソルが上下矢印になり、境界を上下に動かせるようになります。
オプティマイザのパラメータを設定する
-
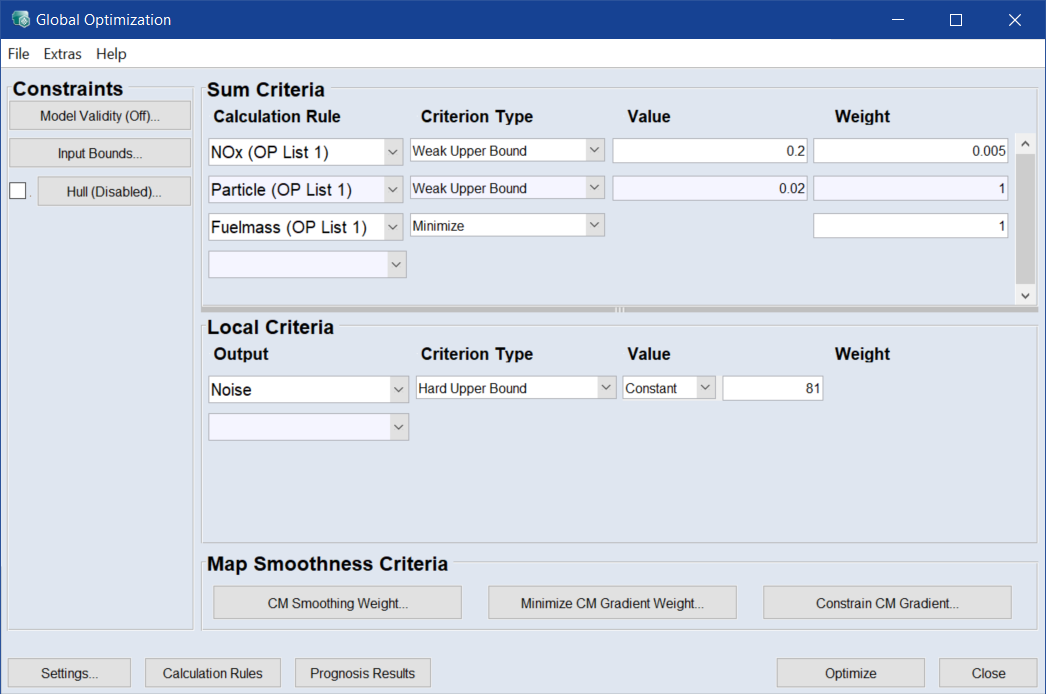
Optimization > Global Optimization を選択します。
Global Optimization ウィンドウが開きます。
-
Sum Criteria 領域で、汚染物質排出量のしきい値を入力します。
- NOx:Weak Upper Bound / 0.2 g/km
- Particle:Weak Upper Bound / 0.02 g/km
-
出力の計算ルールを定義します。
ASCMO-STATICオンラインヘルプには、欧州の走行サイクルにおいてg/hで測定された汚染物質排出量をg/kmに変換する方法が記載されています。
-
燃料消費を最小量に抑えるため、出力 Fuelmass の目標を Minimize にします。
その他にも、たとえばエンジンノイズ Noise が80dBを超えないようにする、というような目標も定義できます。これは、Local Criterion(Hard Upper Bound / 80 dB)として指定でき、これはすべての動作ポイントに対して(Value = Constant)、または個々の動作ポイントごとに(Value = per OP)設定することができます。
-
最適化結果をモデル出力の有効範囲に制限する方法は、最適化結果の範囲を制限するを参照してください。
-
次に、各最適化目標の重み付け(優先度決定)を行います。
最適化目標の重み付けを行う
- Sum Criteria 領域の Weight 列に、各全体目標の重みを入力します。
-
Local Criteria 領域の Weight 列に、各ローカル目標の重みを入力します。
数値が大きいほど重みが大きくなります。
注記
目標タイプが Hard Upper Bound または Hard Lower Bound の場合は、重みの値は入力できません。